Bif_torque_remote

This function returns the angle between, current plane of bifurcation and previous plane of bifurcation. This is a bifurcation level metric and from the figure, the current plane of bifurcation is formed between C D and E where all three are bifurcation points and the previous plane is formed between A B and C bifurcation points.
A torque is the inner angle measured between two planes (current & parent) of bifurcations. Plane DCE has current bifurcation and plane CAB has parent bifurcation.
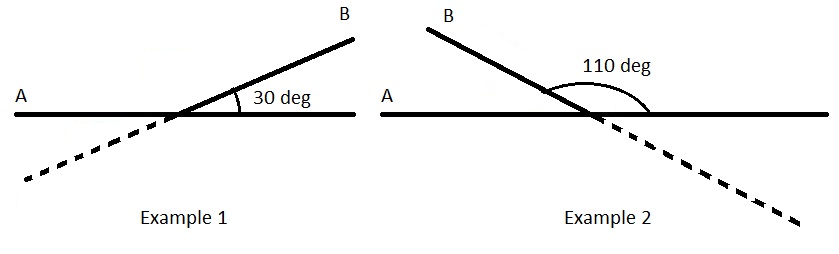
Although LM returns the absolute angle between CAB and DCE as the result, it must be noted that intuitively what we are measuring is relative change in the angle of second plane (DCE) with respect to the first plane (CAB). Therefore, angles > 90 degrees should be considered as pi - angle.
i.e. in Example1 tilt = 30deg. and in Example2 tilt = 180-110 = 70deg.
i.e. in Example1 tilt = 30deg. and in Example2 tilt = 180-110 = 70deg.
Function Output Type : Real
Calculated : At each bifurcation point
Returns a value : For each bifurcation
Output:
| Metric | Total_Sum | #Compartments (considered) |
#Compartments (discarded) |
Minimum | Average | Maximum | S.D. |
| Bif_torque_remote | 6525.84 | 91 | (1011) | 9.31363 | 71.7126 | 148.094 | 38.3161 |
Values to consider : All
Output Interpretation :
The the Total_Sum of the Bif_torque_remote doesn't make sense.
Total_Sum = 6525.84 gives Total_Sum, Minimum = 9.31363 gives minimum, Maximum = 148.094 gives maximum for given input neuron.
References :

Minimum, average and maximum values are meaningful for Bif_torque_remote.
Angles at the first bifurcation point are not well defined, hence should be discarded from the analysis.
Angles at the first bifurcation point are not well defined, hence should be discarded from the analysis.